需求數(shù)量:0
價格要求:面議
所在地:江蘇省
包裝要求:
產(chǎn)品關(guān)鍵詞:邯鄲注塑機械手廠家,注塑機械手
***更新:2020-11-15 11:08:25
瀏覽次數(shù):3次
聯(lián)系我們當(dāng)前位置:首頁?產(chǎn)品供應(yīng)?五金、工具?噴涂工具?邯鄲注塑機械手廠家 蘇州啟川機器人科技供應(yīng)

需求數(shù)量:0
價格要求:面議
所在地:江蘇省
包裝要求:
產(chǎn)品關(guān)鍵詞:邯鄲注塑機械手廠家,注塑機械手
***更新:2020-11-15 11:08:25
瀏覽次數(shù):3次
聯(lián)系我們聯(lián)系人:田生
郵箱: qctianrobot@jsqcrobot.com
電話: 15250431519
傳真: 0512_65409560
網(wǎng)址:
手機: 0512-65409560
地址: 蘇州市相城區(qū)聚金工業(yè)區(qū)興太路88號
[當(dāng)前離線] [加為商友] [發(fā)送信件]
詳細(xì)說明
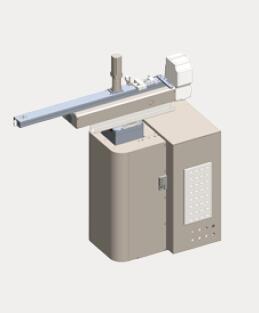
注塑機機械手是能夠模仿人體上肢的部分功能,可以對其進行自動控制使其按照預(yù)定要求輸送制品或操持工具進行生產(chǎn)操作的自動化生產(chǎn)設(shè)備。注塑機械手是為注塑生產(chǎn)自動化專門配備的機械,它可以在減輕繁重的體力勞動、改善勞動條件和安全生產(chǎn);提高注塑成型機的生產(chǎn)效率、穩(wěn)定產(chǎn)品質(zhì)量、降低廢品率、降低生產(chǎn)成本、增強企業(yè)的競爭力等方面起到及其重要的作用。
在注塑工業(yè)中適用的機械手按其智能程度可以分為以下兩種類型:
1、基本型注塑機械手,該類型機械手一般包括固定模式程序和按生產(chǎn)工藝需求的教導(dǎo)模式程序。固定模式程序涵蓋了目前注塑生產(chǎn)的幾種標(biāo)準(zhǔn)工藝,利用工業(yè)控制器來做簡單、規(guī)則和重復(fù)的動作。教導(dǎo)模式程序是特意為生產(chǎn)工藝特殊的注塑機適用,通過把基本動作的有序而安全的編排達(dá)到成功取物的目的。
2、智能型注塑機械手,邯鄲注塑機械手廠家,該類型機械手一般包括多點記憶置放、任意點待機、較多自由度等功能,一般采用伺服驅(qū)動,能夠進行比較大限度的仿人執(zhí)行比較復(fù)雜的操作,邯鄲注塑機械手廠家,還可以通過配備先進的傳感器,讓其具有視覺,邯鄲注塑機械手廠家、觸覺和熱覺功能,使其成為具有很高智能的注塑機器人。
邯鄲注塑機械手廠家
影響注塑機械手生產(chǎn)的因素有哪些
定位方法和速度
不同的定位方法影響不同。如機械擋塊定位時,定位精度與擋塊的剛度和碰接擋塊時的速度有關(guān)。定位速度對定位精度影響很大,這是由于定位速度不同時,耗費的運動部件的能量不同。一般為減小定位誤差時,咱們應(yīng)合理操控定位速度,如進步緩沖設(shè)備的緩沖功能和緩沖功率,操控驅(qū)動體系使運動部件適時減速。
精度和剛度
機械手的制作精度和安裝調(diào)速精度對定位精度有直接影響,機械手自身的結(jié)構(gòu)剛度和接觸剛度較低時,因易產(chǎn)生振蕩,定位精度一般較低。開關(guān)操控、電液份額操控和伺服操控的位置操控精度是各不相同的。這不僅是由于各種操控元件的精度和靈敏度不同,并且也與位置反饋設(shè)備有關(guān)。
運動件的分量和驅(qū)動源
運動件的分量包括機械手自身的分量和被抓物的分量。運動件分量的變化對定位精度影響較大。一般,運動件分量增加時,定位精度降低。因而,設(shè)計時不僅要減小運動部件自身的分量,并且要考慮工作時抓重變化的影響。液壓、氣壓的壓力波動及電壓、油溫、氣溫的波動都會影響機械手的重復(fù)定位精度。因而選用必要的穩(wěn)壓及調(diào)節(jié)油溫措施,如用蓄能器穩(wěn)定油壓,用加熱器或冷卻器操控油溫,低速時用溫度、壓力補償流量操控閥操控。 嘉興注塑機械手廠家
注塑機械手是為注塑出產(chǎn)自動化專門配備的機械,它能夠在減輕深重的體力勞動、改進勞動條件和安全出產(chǎn);能夠仿照人體上肢的部分功能,能夠?qū)ζ溥M行自動控制使其按照預(yù)定要求運送制品或料理東西進行出產(chǎn)操作的自動化出產(chǎn)設(shè)備。提高注塑成型機的出產(chǎn)功率、穩(wěn)定產(chǎn)品質(zhì)量、下降廢品率、下降出產(chǎn)成本、增強企業(yè)的競爭力等方面起到極其重要的效果。現(xiàn)在,國內(nèi)的機械手類型比較簡單,且大都用于取件。隨著注塑成型工業(yè)的開展,以后將有越來越多的機械手用于上料、混合、自動裝卸模具、收回廢料等各個工序上,并且將朝著智能化方向開展。
注塑用機械手的一切動作都在操控系統(tǒng)的指揮下完成,尤其是機械手與注塑機的和諧工作聯(lián)系,更是要依靠操控系統(tǒng)來達(dá)到。在操控系統(tǒng)的指揮下,機械手按照預(yù)訂的工作程序完成各個動作,從而將注塑生產(chǎn)出的制品從模具中取出并傳送到指定地址或下一個生產(chǎn)工序中,并向模腔中噴灑脫模劑。在規(guī)劃時,應(yīng)根據(jù)注塑機的性能,機械手的作業(yè)條件和要求,制品的形狀和重量等來確定操控系統(tǒng)。一般來說,規(guī)劃或選用操控系統(tǒng)應(yīng)遵從以下一些關(guān)鍵:
(1) 應(yīng)保證機械手有足夠的定位精度;
(2) 應(yīng)注意機械手與注塑機的動作配合和諧,保證機械手抓取制品脫離模具后,注塑機和機械手可以各自繼續(xù)進行動作,從而減少時刻浪費;
(3) 應(yīng)注意操控機械手的運轉(zhuǎn)速度,即要使機械手可以滿足注塑成型**短周期的要求,有要考慮是否會發(fā)生慣性沖擊和振動;
(4) 應(yīng)考慮操控系統(tǒng)的費用與實際工作要求之前的平衡聯(lián)系。
注塑用機械手在抓取制品及噴灑脫模劑時一般選用如下的工作過程:
機械手手臂下降并引發(fā)注塑機開模-注塑機頂出注塑制品并向機械手宣布頂出信號—機械手伸入模腔中抓取制品-機械手向模腔噴灑脫模劑—機械手上升離開模腔—機械手向注塑機宣布閉模信號并引發(fā)注塑機閉模—機械手移動到指定方位處放下制品—機械手回復(fù)到原位預(yù)備進行下一次動作。注塑用機械手的技術(shù)參數(shù)確認(rèn)機械手的標(biāo)準(zhǔn)和作業(yè)性能,主要的技術(shù)參數(shù)有以下幾點:抓重:機械手抓取制品的額定重量或載荷;
手臂的運動參數(shù)包含手臂的伸縮,升降,反轉(zhuǎn)等運動速度和規(guī)模;手部的抓取規(guī)模及抓取力的大小;
定位精度:方位的設(shè)定精度和重復(fù)定位精度;
定位方法:點位控制或連續(xù)軌跡控制方法;
驅(qū)動系統(tǒng)參數(shù):控制系統(tǒng)參數(shù);機械手的作業(yè)循環(huán)時間;自由度數(shù)目和坐標(biāo)形式等。 邯鄲注塑機械手廠家
邯鄲注塑機械手廠家
注塑機機械手的分類:
1、基本型注塑機械手,該類型機械手一般包括固定模式程序和按生產(chǎn)工藝需求的教導(dǎo)模式程序。固定模式程序涵蓋了注塑生產(chǎn)的幾種標(biāo)準(zhǔn)工藝,利用工業(yè)控制器來做簡單、規(guī)則和重復(fù)的動作。教導(dǎo)模式程序是特意為生產(chǎn)工藝特殊的注塑機適用,通過把基本動作的有序而安全的編排達(dá)到成功取物的目的。
2、智能型注塑機械手,該類型機械手一般包括多點記憶置放、任意點待機、較多自由度等功能,一般采用伺服驅(qū)動,能夠進行比較大限度的仿人執(zhí)行比較復(fù)雜的操作,還可以通過配備先進的傳感器,讓其具有視覺、觸覺和熱覺功能,使其成為具有很高智能的注塑機器人。 邯鄲注塑機械手廠家
蘇州啟川機器人科技有限公司致力于機械及行業(yè)設(shè)備,以科技創(chuàng)新實現(xiàn)***管理的追求。啟川科技擁有一支經(jīng)驗豐富、技術(shù)創(chuàng)新的專業(yè)研發(fā)團隊,以高度的專注和執(zhí)著為客戶提供沖壓機器人,沖壓機械手,沖壓自動化,噴涂機器人。啟川科技始終以本分踏實的精神和必勝的信念,影響并帶動團隊取得成功。啟川科技始終關(guān)注機械及行業(yè)設(shè)備市場,以敏銳的市場洞察力,實現(xiàn)與客戶的成長共贏。
文章來源地址: http://www.qyzv.cn/cp/2002018.html
本企業(yè)其它產(chǎn)品 更多>>